- OMRON Story
-
 机器人能够多大程度地接近人类?
机器人能够多大程度地接近人类?
-
标准化设备程序:不依赖人与机械
-
欧姆龙改变“城市”!?面向2030年的地方创生项目
-
从东西方的交汇点推动全球生产制造创新
-
与爱信AW共同打造智能工厂
-
体验近未来生产制造现场
-
【行业首创】将AI直接搭载于机械控制器而非云端
-
加速开放式创新的未来生产现场
-
通过工匠技艺的“可视化”,在制造现场掀起革命
-
太阳能电池板开拓京都的未来
-
为解决生产制造一线的课题,试图扩展机器人的可能性
-
通过机械弥补身体缺陷,打造每个人都能够展现能力与个性的工厂
-
实践企业理念各自创造新的精彩
-
让5,300万婴幼儿和他们的家人安度舒适之夜
-
将“近未来设计”化作创新原动力
-
如何让AI与制造现场合二为一?
~让机械拥有熟练技师的智慧,是一个不小的挑战~ -
深入现场的工程师,向生产制造现场的难题发起挑战
~提升生产效率的,是人的智慧~ -
未来,谁都不会错失重病信号
~组合血压计与心电计,尽早发现患病风险~ -
让放射线技师的医疗现场更加安全
~用无线手持开关创建全新的全球商务模式~ -
先进的生产制造,撑起不变的“强大”
~支撑着社会与工业50年发展的电子部件“MY继电器”~ -
走向电力“零浪费”的未来,“不知其踪”的电源系统是关键
-
电子部件支撑电子社会演进,村田制作所领跑制造前列
-
让更多人体验到在快乐中成长的技术
-
“机灵”的机器人——构建人与机器的新型关系
-
一条全自动包装线的诞生记
-
授之以鱼,更授之以渔
-
人机完美默契
-
空间投影,通向未来的路标
-
从生产现场获得灵感,抑制振动从此变得不一样
-
欧姆龙:“零事故”的安全生产现场
-
慧眼识世界:超越人类的“机械之眼”
-
IoT革命进行时
-
MEMS-从微观世界中掌握地球的律动-
-
来自大自然的灵感 人工智能就在身边
-
乒乓球机器人秀神技
-
欧姆龙大数据 智能工厂的全新体验
|
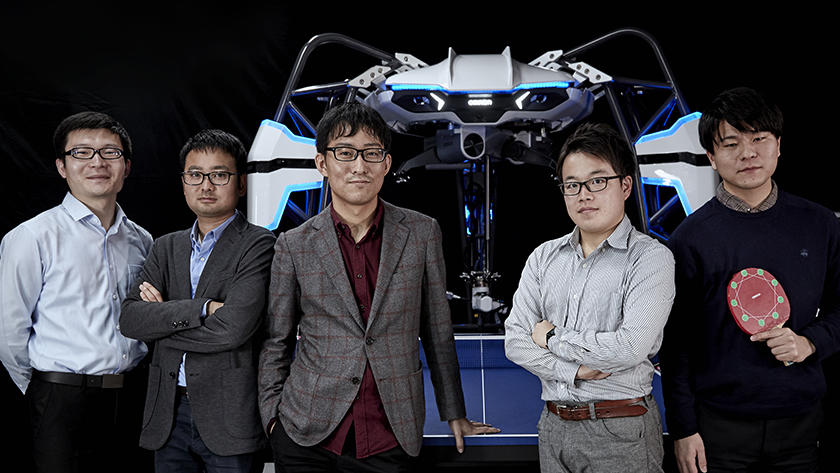
机器人能够多大程度地接近人类? 迭代进化的乒乓球机器人“FORPHEUS”的开发人员访谈(前篇) 作为欧姆龙核心技术的体现,乒乓球机器人“FORPHEUS”每年都在不断升级。 第五代FORPHEUS采用了通过削球和上旋球回球的先进技术、高精准预测对手打球动作的技术,并搭载了适合每一名球员的陪练功能。欧姆龙距离“人机完美默契”所需的“激发人类能力的机器人”的目标又近了一步。FORPHEUS的研发团队聚集了5名技术人员,其中有两人还是刚进公司的新员工。公司希望的研发时间是9个月。下面,我们将近距离了解研发的经过,看一看他们在这段时间都遇到了什么挑战,又取得了什么成果。 (成员介绍) 团队主管 八濑 哲志 (嵌入式系统研发中心 无线与嵌入研究室) (照片中间) 硬件/控制负责人 浅井 恭平 (智能系统研发中心 AI控制研究室) (左起第二位) 控制负责人 刘 晓俊 (智能系统研发中心 AI控制研究室) (最左侧) 视觉负责人 中山 雅宗 (传感研发中心 图像传感研究室) (右起第二位) 视觉负责人 佐佐木 勇辉 (传感研发中心 图像传感研究室) (最右侧) 挑战全球首款“如人类手肘般活动的机械臂” ——据说第五代的研发课题是“KURO-OBI(黑带)~专业球员和教练~”。为什么会确定这样一个课题呢? 八濑:我们研发FORPHEUS的目的是希望人们通过体验来了解和共同感受欧姆龙力求实现的“人机完美默契”这一未来愿景。“人与机械融合”是指人与机械互相学习,共同成长的状态。要提高选手的乒乓球能力,就需要根据每一个人的情况进行陪练,为此首先要求FORPHEUS本身就是一位“专业球员”,而且还要成为一位“专业教练”。 ——要成为“专家”,具体都进行了哪些升级? 浅井:我们让FORPHEUS具备了“削球和上旋球回球”的能力。为此我们需要从硬件上进行调整。我们所用的拾取与放置(Pick and Place)※机器人能够做出向前推动球拍击球的动作,但向上挥拍的动作不够,因此我们考虑增加一根轴看看效果,于是我们在关节上增加了一根轴,从而达到了“如人类手肘般活动”的效果。 八濑:除了乒乓球外,拾取与放置的目标是能够像人手那样进行精细作业。这意味着我们要想办法在硬件上做到类似人类肩部到手指的功能,这对我们来说是一个挑战。 ※拾取与放置(Pick and Place)……工厂自动化中让机械臂抓起特定位置的物品并搬运到特定位置的机构 ——团队中有硬件方面的专家吗? 浅井:新来的刘晓俊在大学学的是硬件,但我们开始研发的时候他还没有加入团队,那时候硬件方面基本都是我在做。我是学信息处理的,硬件设计并不在行,甚至都没有接触过,做起来非常痛苦。 ——那真是不容易啊。哪些方面比较棘手呢? 浅井:市面上有无数种电机和减速机,要从中选出最合适的非常耗费时间。电机控制也是,最开始只是非常简单的动作就会使轴振动,我们花了一两周的时间去查明原因。因为过去没有那种形状的机械臂。相关资料也没有,我们只能每天反复尝试并总结经验。 八濑:除了改善硬件外,如何让硬件动起来也是一项重大课题。乒乓球是一项需要快速挥拍的运动。只有在几十毫秒,甚至几毫秒的高精度控制下才能顺利挥拍击球。我们在制作兼顾速度和精度的硬件,以及为大限度发挥硬件性能设计算法方面耗费了大量时间。 浅井:例如,乒乓球的上旋球是从下往上挥拍使球旋转,而向机器人发送什么指令,让机器人做出什么动作,世界上还没有人在进行这些研究,如果控制球拍的多轴机械臂是全球首款,那么控制机械臂活动的算法也是独一无二的。给人的感觉是我们闯入了没有标准答案的世界。或许其他方法也有解,但在有限的研发时间内做到现在这一步也算是一种好的方案了。
刘:我和浅井正好相反,我在大学学的是机械,进公司前没有思考和实施算法的经验。所以花费了非常多的时间……即便如此也必须得赶在规定的时间拿出成果。从这种压力中放松下来时,我参加了在老家上海举行的进博会,展出了上一代乒乓球机器人。 ——中国是乒乓球的发源地,观众好像也很严格吧。 刘:他们的要求很高,比如“能不能再打快点?”,“扣个球看看”。这让我真实感受到,如果自己不努力实施算法就无法让他们知道乒乓球机器人的厉害之处,这反而激励了我。现在的第五代机器人应该能够满足想要“打得更快”的观众。 浅井:第五代机器人在1月的CES上首次亮相,很多人注意到机器人“在拉旋转球”、“手腕的动作有点奇怪”这些细节。在4月的汉诺威工业博览会上,德国总理默克尔也到现场观看,所有的艰辛都化成了喜悦。 成为和人类一样具有出色回球能力的机器人 ——除了机械臂外,第五代还增加了摄像头的数量吧? 中山:乒乓球的动作富于变化,如果只有一台摄像头,就无法顺利拍到需要的动作。例如挥拍的时候,身体会妨碍摄像头拍摄手部的动作。为此,我们将拍摄人的动作的摄像头增加到了两个。 此外,为了判断人的击球方向,除了身体的动作外,还需要感知人持拍的位置和方向,于是我们又新增加了拍摄球拍的摄像头。这部分图像处理由新加入的佐佐木负责。 ——佐佐木有图像处理的经验吗? 佐佐木:我在大学做过程序设计,但图像处理还是第一次。首先比较棘手的是拍摄球拍花费了非常多的时间。 八濑:在机器人看来,球拍非常小。而且每次展会的环境都在变化。灯光环境各不相同,观众的动作和服装的颜色也大相径庭。在这样的环境中判断球拍,并为驱动系统进行调整是很不容易的。 ——即便只是听你讲,也能想象到难度之大。 佐佐木:不断追求精度也是首次挑战。上大学的时候做出差不多的东西提交上去就结束了,但现在,如果我制作的数据精度不够,就无法有效控制机器人。从未想到制作数据后不断提高精度的工作是如此耗费时间。 中山:根据球拍的标记判断球拍的方向时,用刚开始研发时的算法是无法准确判断球拍方向的。因此,佐佐木在追求更高的精度,同时我则修改了算法,以便在数据精度不高的情况下也能判断击球方向。 此外,球拍击球的瞬间,由于球和标记重叠,无法计量球拍的数据。也就是说只有球拍击球前的数据。我们也尝试了各种算法来预测球拍和球的运动。经过反复尝试,我们构建了一个系统,能够在各种人和各种持拍方式的情况下或多或少地预测球拍和球的运动,从而能够在击球前高精度地预测击球线路。我们坚信,机器人事先掌握预测线路后,已经能够近似于人那样打出高质量的回球。 ——真厉害。正因为如此才会在意体验者的感受吧? 佐佐木:对于观众而言,视觉方面的研发成果是容易注意到的。在CES上,有的观众对这部分成果提问,有的观众拍照,反响很不错。 中山:我最高兴的是听到观众说“和去年大不一样”、“不是改善,而是进化”。我觉得他们能够很好地理解我们采用的技术和实现的功能,并且能够乐在其中。 ——研发人员克服艰辛,推出了第五代FORPHEUS。那么,在未来等待着的是怎样的幸福未来呢? (后篇)待续。 |
|